
赵艳 曹向阳 吕尚领
(纽科伦(新乡)起重机有限公司)
摘要:铸造起重机标准2012版在起重机安全方面提出更高的要求,通过对起升机构安全制动器的要求、工作原理的说明,阐述了安全制动器在铸造起重机上应用的重要性及必要性。
关键词 :铸造起重机;安全制动器;起升机构;工作原理;注意事
1引言
铸造起重机是炼钢连铸工艺中主要设备之一,主要用于转炉加料跨向转炉兑钢水,在精炼跨将钢水包吊运至精炼炉或在钢水接受跨将钢水包吊运至连铸回转平台上。铸造起重机在高温、高粉尘的恶劣环境中工作,工作级别高。铸造起重机出现故障后可能会造成较大损失和严重后果。标准JB/T7688.5-2012《冶金起重机技术条件 第5部分 铸造起重机》已正式实施,新标准增加了主起升机构安全制动器的设置要求,提高了铸造起重机的安全性。本文通过对安全制动器的要求和工作原理的阐述,探讨安全制动器在铸造起重机上的应用。
2铸造起重机标准对安全制动器设置的要求
铸造起重机的主起升机构传动链应满足下列条件之一:
1)主起升机构设置两套驱动装置,即两台电机、两套减速系统、一套或多套卷筒装置和四套制动装置,并在输出轴有刚性连接。当其中一套电动机、控制装置或者传动链失效时,用另一套驱动装置通过减速器之间的刚性连接装置,可将动力传到故障侧,使一套或多套卷筒装置的转速一致,保证吊具上的两个吊点在高度上一致,使钢水包不会发生倾斜,故在卷筒端部可不设置安全制动器。
2)主起升机构设置两套驱动装置,在输出轴上无刚性连接或设置一套驱动装置时,均应在卷筒上设置安全制动器。
3)当额定起重量不大于16t时,如果主起升机构不设置安全制动器,在设计时其工作级别应至少比实际作业条件所要求的高2级,最小工作级别不应低于M5。
3安全制动器的工作原理
在这里介绍一种AP电磁自制动安全制动器,它采用楔形自锁结构制动,配有动作监控开关进行连锁保护和故障反馈,其动作灵敏,上闸时间短。可广泛应用于大中型起重机、港口装卸机械的起升机构、矿用提升机等,尤其是铸造起重机以及其他机构低速轴的安全制动,在其工作制动器失效或者传动轴、齿轮等传动部件失效的情况下用于紧急安全制动。
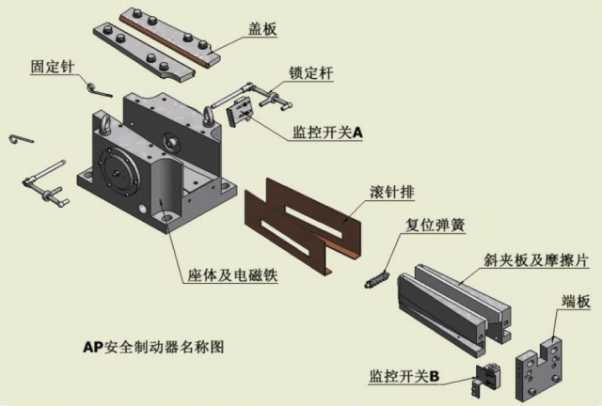
图1 AP安全制动器组成图
在任何情况下,都不允许单独断开安全制动器的电源,令其单独制动,该制动器具有应急启动装置,仅作应急使用,通电时间不得超过5秒。
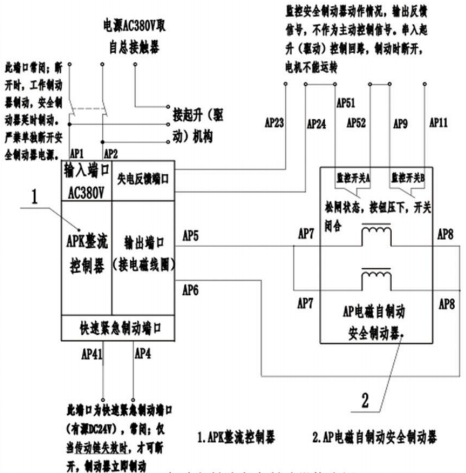
图2 AP制动器接线图
1)输入AC380V电源(AP1、AP2)取自总接触器。a.松闸:APK整流控制器通电,AP安全制动器松闸。工作时,AP安全制动器应先于起升(驱动)电机通电并始终处在通电开闸状态。b.上闸:①停电或卷筒超速时,断开APK整流控制器电源(AP1、AP2)(须同时断开起升(驱动)机构电源,工作制动器上闸),AP安全制动器线圈延时失电,上闸。机构采用低速轴超速开关及传动链失效检测装置输出控制信号时,当超速开关检测到超速信号或按下设备急停按钮,同时断开起升(驱动)机构和AP安全制动器电源,AP安全制动器在工作制动器上闸后延时夹持制动盘。②仅当传动链失效(工作制动器完全失效、联轴器失效或断轴)时,才可断开AP41、AP4(须同时断开起升(驱动)机构电源,工作制动器上闸),AP安全制动器快速上闸(快于工作制动器上闸,对传动链有冲击,有可能损坏传动链上的零部件)。2)输出线圈端(AP5、AP6),接AP安全制动器线圈(AP7、AP8)。3)监控开关A、B监控安全制动器动作情况,输出反馈信号,不作为主动信号。AP23、AP11串入起升(驱动)控制回路,AP安全制动器夹紧制动盘(或刹车时),监控开关弹开,切断起升(驱动)电源,电机不能运转。
制动后的复位: ①断开输入电源(AC380V)。②超速开关复位且紧急制动端口(AP4、AP41)导通状态,重新送电(AC380V),监控开关A的按钮被压下导通。③点动使主钩上升,粘有摩擦片的两片斜夹板回退,直至顶住端板(如不能完全回退,可将两条松闸螺栓通过端板上的长圆孔同步均匀旋入斜夹板,将其拉回),将监控开关B按钮压下(不得用手触摸滚轮或斜夹板,以免夹伤)导通。
4安全制动器应用的注意事项
起升机构的安全制动器装设在驱动系统传动链的最末端,即卷筒装置端部的制动盘上。安全制动器的制动力矩比高速轴上的工作制动器大得多,当起升机构高速运行时,若安全制动器与工作制动器同时接到抱闸命令,两种制动器同时上闸,由于安全制动器上闸的动作时间快且制动力矩大,低速轴迅速停止转动,而高速轴上的电机、减速机、制动轮等所具有的很大转动惯量需要在很短的时间内消耗掉,因此会对整套系统带来很大的冲击载荷,将造成系统的薄弱环节被破坏。
因此,无论任何情况下,安全制动器的控制系统需要设计为安全制动器都要滞后于工作制动器和辅助制动器上闸,减少安全制动器上闸对传动系统带来的冲击。可以设置一套检测系统,确保安全制动器在非事故状态下紧急制动无误动作,在事故状态下能确保紧急制动按照程序设定工作,保证起升机构吊运安全。
参考文献
[1] GB/T 3811—2008 起重机设计规范[S].
[2] JB/T 7688.5—2012铸造起重机[S].
[3] JB/T 7688.1—2008通用要求[S].
[4] 李会勤,李姿之.冶金起重机[M].北京:机械工业出版社 ,2010.